 登錄
登錄  注冊
注冊 短信碼登錄
密碼登錄
獲取短信驗證碼
獲取短信驗證碼

2023-09-15
來源:南陽防爆
(版權歸原作者或機構所有)
一、振動的測量
振動值有三種表達形式:振動位移、振動速度、振動加速度。
在低頻(f<10Hz)范圍內,一般以測量振動位移為主,因為低頻范圍內造成破壞的主要因素是應力的強度,位移量是與應變、應力直接相關的參數。
在中頻(f=10~1000Hz)范圍內,一般以測量振動速度為主,因為部件的疲勞進程與振動速度成正比,振動能量與振動速度的平方成正比。在這個范圍內,零件主要表現為疲勞破壞,如點蝕、剝落等。
在高頻(f>1000Hz)范圍,一般以測量振動速度為主。因為加速度表征部件所受沖擊力的強度。沖擊力的大小與沖擊的頻率和加速度值正相關。
根據測量位置的不同又分為軸振動和座振動。對于電機,一般測量軸承座振動速度和位移的有效值,以及軸振動位移的峰峰值。具體的測量位置按GB10068或其它相關標準。
型式試驗時,應測振動位移和振動速度值,檢查試驗時,對于600rpm以下的電機只需測座振動位移,600~15000rpm的電機只需測座振動速度。
對于滑動軸承且轉速大于1200rpm、額定功率大于1000kW的電機,有必要測量軸振動位移。特別是撓性轉子電機,更推薦測量軸徑向振動位移。
二、電機出廠振動考核標準
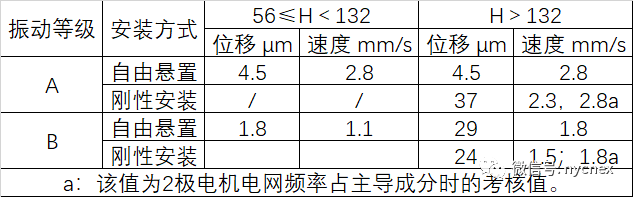
GB/T10068規定了對于中心高56mm及以上個、功率50MW及以下、轉速為120~15000rpm的直流電機和三相交流電機,在脫離開任何負載和原動機、在規定條件下對規定的位置進行工廠驗收振動測量時的考核值。如下表所示。

一臺電機,自身平衡較好且振動強度等級符合GB/T10068的要求,但在現場安裝中因地基不平、負載機械的反作用以及電源中的紋波電流的影響等各種因素,也會引起較大的振動。另外,由于所驅動的各單元的固有頻率與電機旋轉體微小殘余不平衡量的激勵頻率極為接近,也會引起振動。
三、電機在用戶現場的振動考核——座振
電機在用戶現場的振動考核可按GB/T6075.3執行,該標準規定了額定功率大于15kW、額定轉速120~15000rpm的機器,在非旋轉部件上測量評價振動。適用于額定工作轉速內、穩定運行工況,在機器軸承、軸承座或機座上現場進行的寬頻帶振動測量。該標準對機器分為兩組:
1組——額定功率>300kW且<50MW的大型機器;軸中心高≥315mm的電機。這類機器通常采用滑動軸承,轉速范圍較寬,從120rpm到15000rpm。
2組——額定功率>15kW但≤300kW的中型機器;軸中心高>160mm但≤315mm的電機。這類機器通常采用滾動軸承且運行轉速超過600rpm。
對指定方向的支承部件柔度分為剛性支承和柔性支承。在測量方向上機器與支承系統組合的固有頻率至少大于主激勵頻率25%,則認為在該方向為剛性支承,否則為柔性支承。
在連續運行監測時對主要受徑向載荷的軸承通常不作軸向振動測量。一般只對具有推力軸承的情況下進行測量。
機器振動危害程度的評估有兩種方法,一種是根據機器軸承的允許值,以及通過支承結構和基礎傳遞至周圍環境的允許值的絕對數值來評定。另一種是根據振動值的變化來評定。簡單說就是絕對值法和相對值法兩種。
1、絕對值法
對振動值的評價分為4個區域:
區域A:新交付的機器的振動通常落在該區域。
區城B:機器振動處在該區域通常認為可無限制長期運行。
區城C:機器振動處在該區域一般不適宜作長時間連續運行,通常機器可在此狀態下運行有限時間,直到有采取補救措施的合適時機為止。
區域D:機器振動處在該區域通常認為其振動烈度足以導致機器損壞。
ABCD各區域的分界點數值見下表:
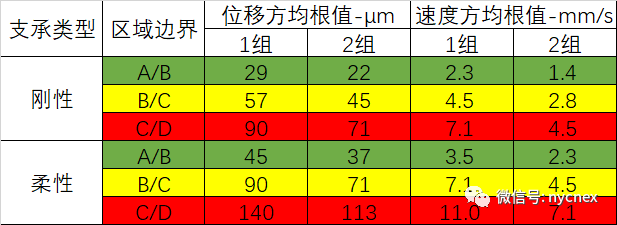
指定的區域邊界值并不專門作為驗收規范,驗收規范應由機器制造商與用戶之間的協議決定。然而,這些數據作為指南可避免過大的缺陷或不切實際的要求。在某些情況下機器可能有特殊性能,要求采用不同的區域邊界值(更高或更低),在這種情況下,通常要求機器制造商必須說明其理由,并且要特別確保機器在較高振動值下運行不會損壞。
2、相對值法
振動值可能出現明顯的變化,這些變化能夠瞬間產生或隨時間而逐漸發展,并可能預示早期的損壞或一些其它問題。故即使未達到上表中的C區,也應采取措施。
當振動量值的變化超過區域B上?的25%(一般值,對于具體的機器可根據經驗采取其它數值)時,認為是有明顯變化,特別是如果它突然發生,此時宜開始進行診斷研究查明變化的原因,并確定下一步適當的措施。
三、電機在用戶現場的振動考核——軸振
通常只有1000rpm及以上具有滑動軸承的電機考核軸振。軸振的允許值與軸的轉速相關,標準推薦的ABCD區域邊界如下:
A/B區域邊界:4800/K
B/C區域邊界:9000/K
C/D區域邊界:13200/K
K為轉速(rpm)開根號數值,即K=n^0.5。
由此可得,對于常見的轉速,對應的邊界見下表:
由于軸振和座振之間的關系沒有簡單的方法來確定,因此當同時測座振和軸振時,應以更嚴格的區域等級來評估機器的振動狀態。
四、用戶現場的振動保護值設置
報警值:警告振動已達到規定的值或顯著的變化已發生,可能需要采取補救措施。通常發生報警情況后,機器可繼續運行一段時間,同時應進行診斷研究以確定振動變化的原因并制定補救措施。
停機值:規定某一振動量值,超過該值機器繼續運行可能會引起損壞。如超過停機值應立即采取措施以減小振動或停機。
基線值:機器正常穩定運行時,在規定位置和方向測得的振動值。機器運行一段時間之后才能獲得基線值。
報警值通常是相對于基線值來設定。
建議設定的報警限值比基線值高出B區上限的 25%。如基線值較低時,則報警值可能在C區之下。
對一臺新機器,沒有基線值,則初始報警值設定宜以其他類似機器的經驗為基礎,或以同意的驗收值為基準。經過一段時期,建立穩態基線值后再相應調整報警值。建議報警限值通常不超過B區上限的1.25倍。如果穩態基線值變化(例如機器檢修后),宜相應地修改報警值。
停機值一般都相同并且通常與基線值無關。但是,對于不同設計的機器停機值會有差異。通常,停機值在C區或D區內。建議停機值不應超過C區上限的1.25倍。
1